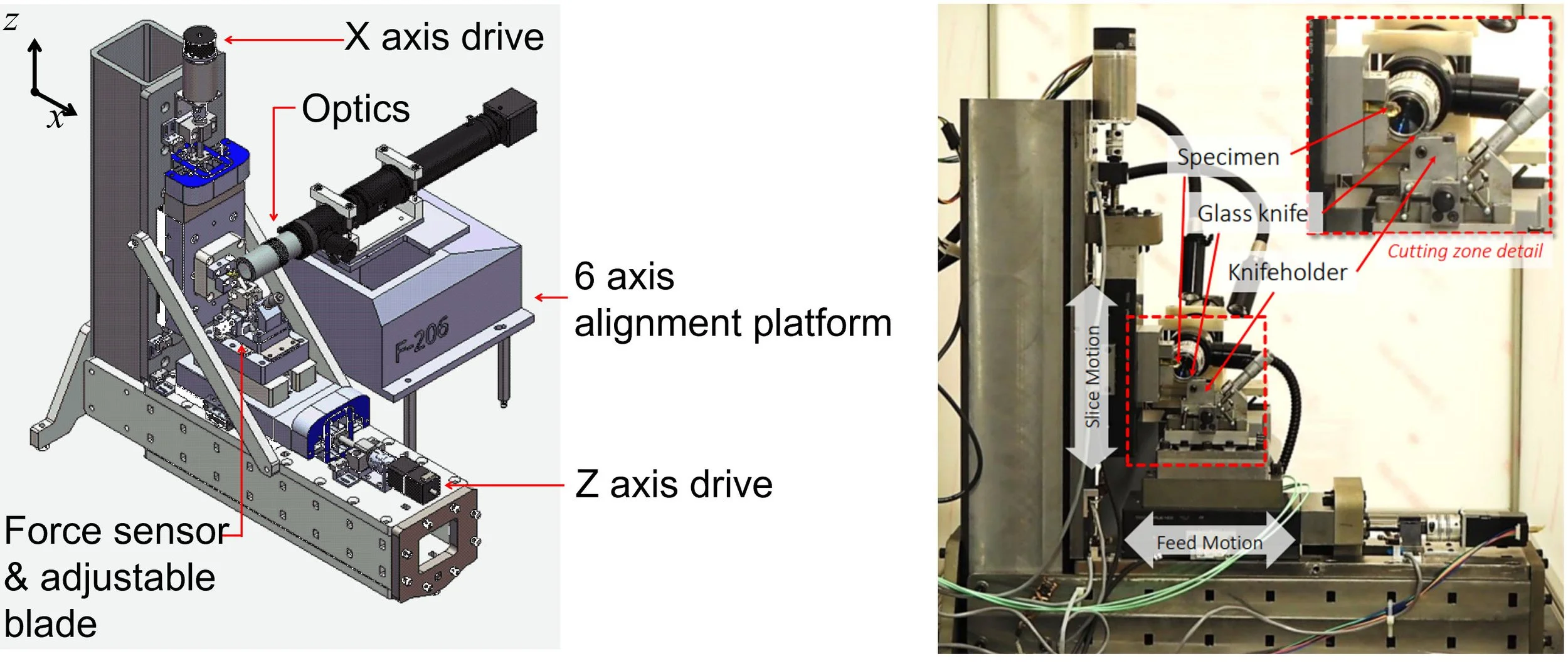
1st generation brain sectioning instrument with imaging and cutting force measurement capability for thick tissue sectioning
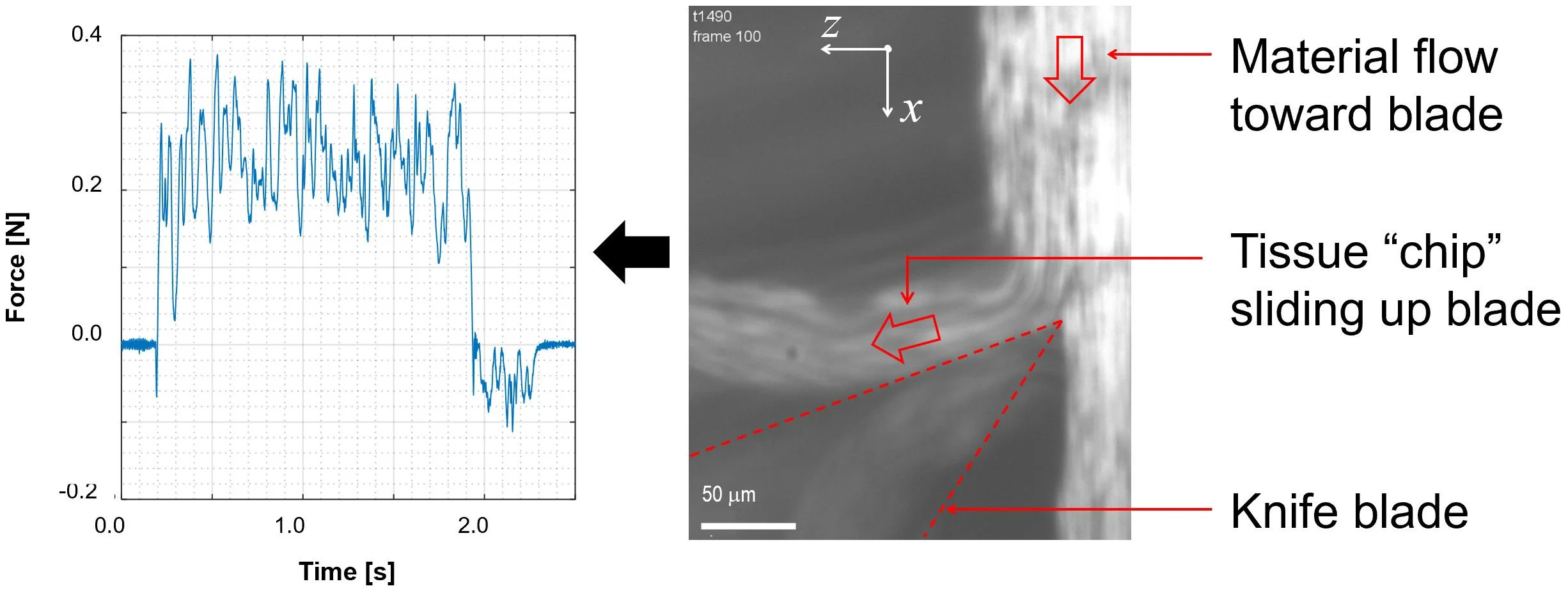
Cutting force measurement and cutting process observation for thick tissue sectioning

Design, manufacturing and testing of precision time pieces
Macro-scale model of 2 DOF flexure mechanism for a decoupled gyroscope mechanism.

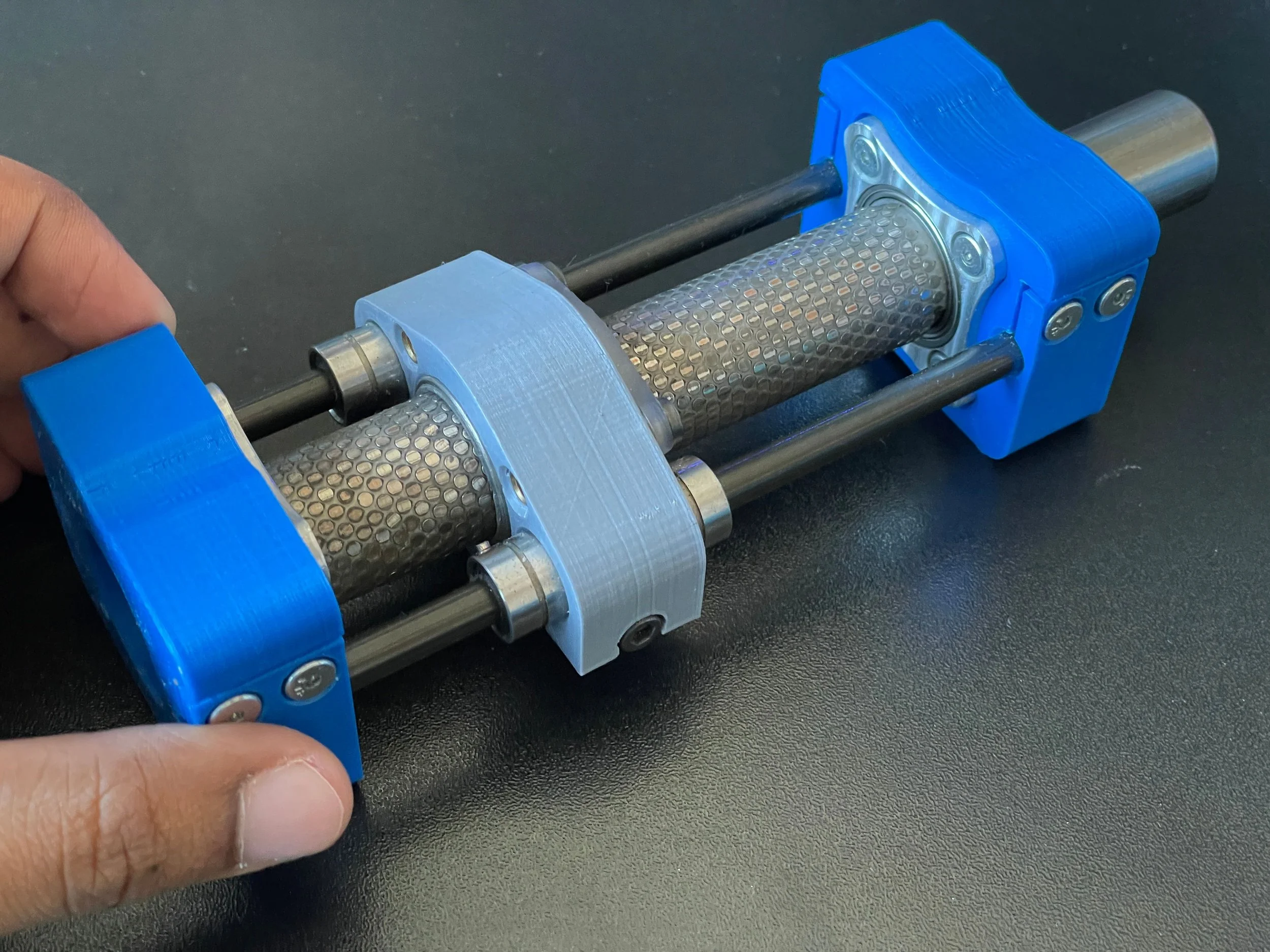
Meso-scale six axis manipulator on a chip - contains 3 imbedded 2 DOF electromagnetic actuators
Prototype of magnetic screw actuator

Deployable mechanism for positioning and support of instruments used in harsh, sub-surface cavities for oil rigs.
Current research and research positions
High-speed continuous sectioning and imaging of brain tissue for mapping of the human connectome
- Research assistant: Possible position pending funding of proposals that are currently under review
- Fellowship student: Open position
A complete map of neural “wiring” in the human brain is the next big step in understanding human physiology. This will require equipment and instrumentation that enables high-rate sectioning of tissue with nanometer-level accuracy. Computational tools can track connections between neurons in these sections and recreate a map of how we are “wired” . Current technologies can not section with the requisite speed and accuracy. We are developing the world’s first high-speed continuous sectioning and imaging machine (custom actuators, sensors, tooling, process parameters, etc…) .Design for high-shock and impact in precision time pieces
- Research assistant: Open position
- Fellowship student: Open position
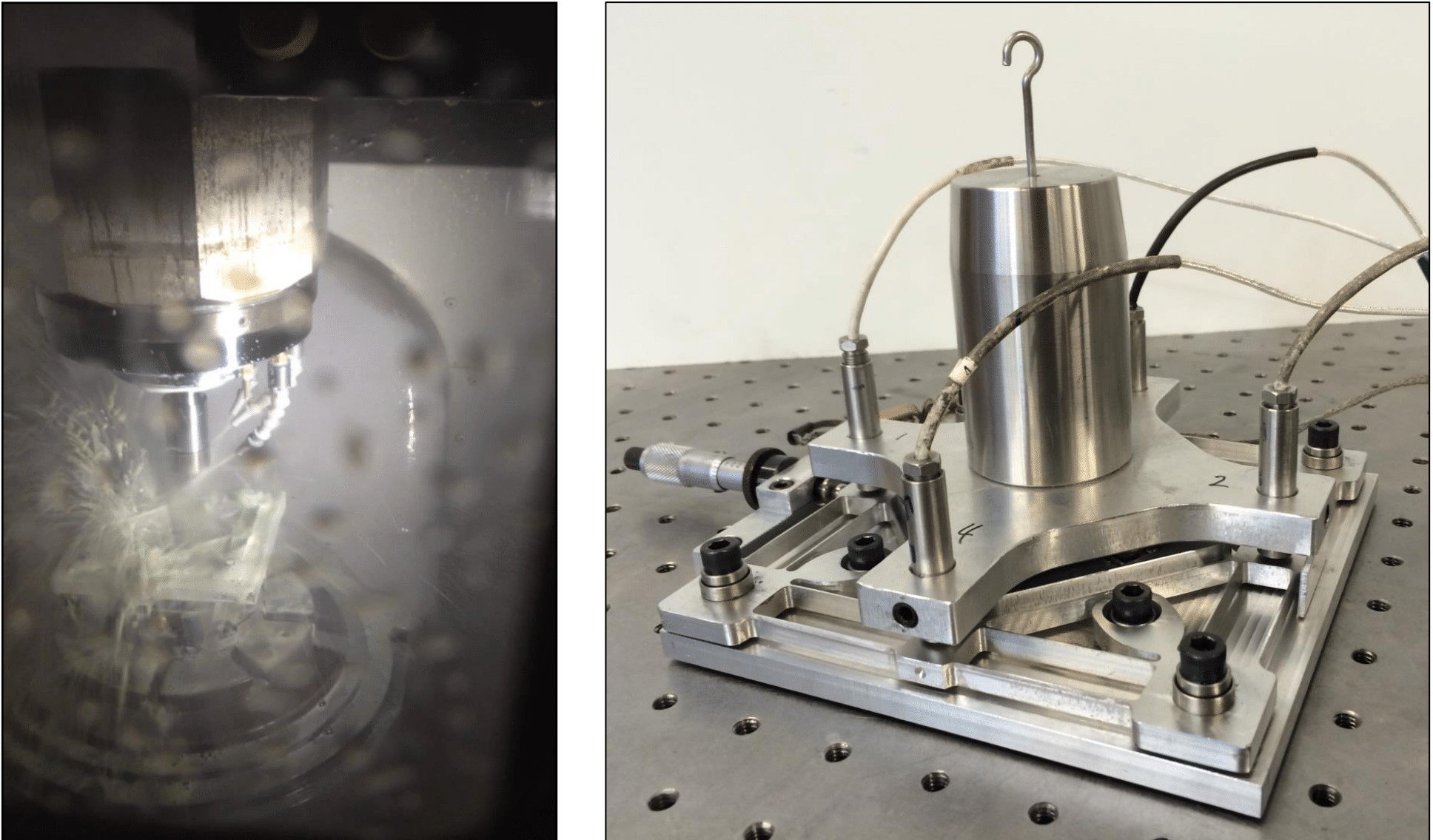
This research focuses on the design, testing and manufacturing knowledge required to use small-scale fasteners (~1mm) used to assemble small and delicate parts in instruments that experience 100s to 1000s of Gs. The joints that rely on these fasteners are sensitive to variations in performance requirements (e.g. magnitude of shock loads and frequency from user activity can vary widely), variation in design specifications and fabrication/assembly errors (e.g. tolerances and magnitude of preload). We are creating design models, measurement instruments, new fastener design concepts and shock mitigation mechanisms that enable precision time pieces to withstand extreme shock loading.
Muscles as actuators in mechanical systems
- Research assistant: Possible position pending funding of proposals that are currently under review
- Fellowship student: Open position
Nearly all robots require actuators that generate force and produce motion. However, the abiotic actuators typically used by engineers have yet to match biological actuators in their ability to dynamically adapt their form and function to changing environments. There is a need to deploy biological actuators as functional components in robots. This research is focused on (i) characterization of the static and dynamic force-displacement behavior of engineered muscle and (ii) concepts and design rules that enable integration of engineered muscle into proof-of-concept biomechanical robotics. In collaboration with Prof. Ritu Raman [MIT MechE].Role of agency and social impact on self-efficacy in marginalized students
- Research assistant: Possible position pending updates on NSF funding of current project
- Fellowship student: Open position
Student agency, or the control a student feels over their learning (e.g. building a project they want vs one that is assigned), has been noted as contributing to a sense of inclusion. There is evidence that socially impactful themes may increase enrollment in university STEM programs. The goal of this work is to create a model and a set of metrics that characterize makerspaces' role in impacting key characteristics that are important for marginalized students, such as engineering identity, sense of belonging, and views on failure.High-speed laser processing for nano-scale and micro-scale microfluidics
- Research assistant: Possible position pending funding of proposals that are currently under review
- Fellowship student: Open position
Lab on a chip technologies are poised to make possible rapid advances in drug development. This will only matter if it is possible to rapidly fabricate prototypes for experiments so that the best designs can be moved forward as products. Unfortunately, there hasn’t been “one technology” that meets the cost-quality-rate-flexibility needs for prototyping; though laser ablation shows a lot of promise. This research focuses on generating the equipment and process optimization knowledge required to reliably employ laser processing in order to generate the requisite 2D and 3D geometries for lab on chip applications